大阪大学の浅田稔教授を中心とする研究グループは子供型ロボット「Affetto(アフェット)」の基本骨格部分を設計・開発しました。柔軟でしなやかな動きが可能であり、人間とのふれあいに適したロボットが親密なパートナーとしての関係を築くことができるかを明らかにする研究に役立てるとしています。
浅田教授らはロボット研究を通して人の発達について深く理解し、ロボットの知能化のための原理を見出すことを目指してきました。そのために子供が周囲の環境について学び、賢くなっていく仕組みについて仮説を立て、子供型ロボットに組み込んできました。ここで重要になるのは子供は養育者との親密な触れ合いの中で多くのことを学ぶ点です。ロボットで同じことを行うためには、ロボットの動作や見た目をより自然にしなければなりません。そのために研究グループは80cm程度のサイズに、柔軟で広い可動範囲の関節を組み込んだ基本骨格の設計に取り組みました。空気圧を利用する動力源を組み込むことで素早さと力強さを持ちながら、静かでしなやかな動作を可能にしました。しかしこれだけでは人が外部から力を加えた時に強く反発するため、ケガをさせる可能性があります。この点は関節を設計しなおすことで回避しました。また、80cmほどの体の中に多くの動力機構を組み込まなくてはいけません。部位によって気圧式の動力とモーターを使い分けることで、スペース効率良く配置することが可能になりました。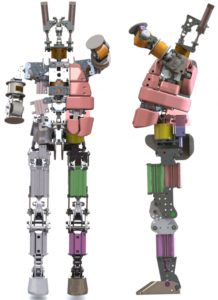 これまでロボットは生産業などで利用されてきた他、人間のパートナーとして利用する試みがなされてきました。その一方で学習の仕組みを探究するための実験装置としての利用も増えてきています。そのため人間と親密に触れ合う方法が求められています。今回開発した骨格に加えて機能的な皮膚などを実装することで、より親密に触れ合うことができる子供のロボットが実現できるでしょう。
これまでロボットは生産業などで利用されてきた他、人間のパートナーとして利用する試みがなされてきました。その一方で学習の仕組みを探究するための実験装置としての利用も増えてきています。そのため人間と親密に触れ合う方法が求められています。今回開発した骨格に加えて機能的な皮膚などを実装することで、より親密に触れ合うことができる子供のロボットが実現できるでしょう。
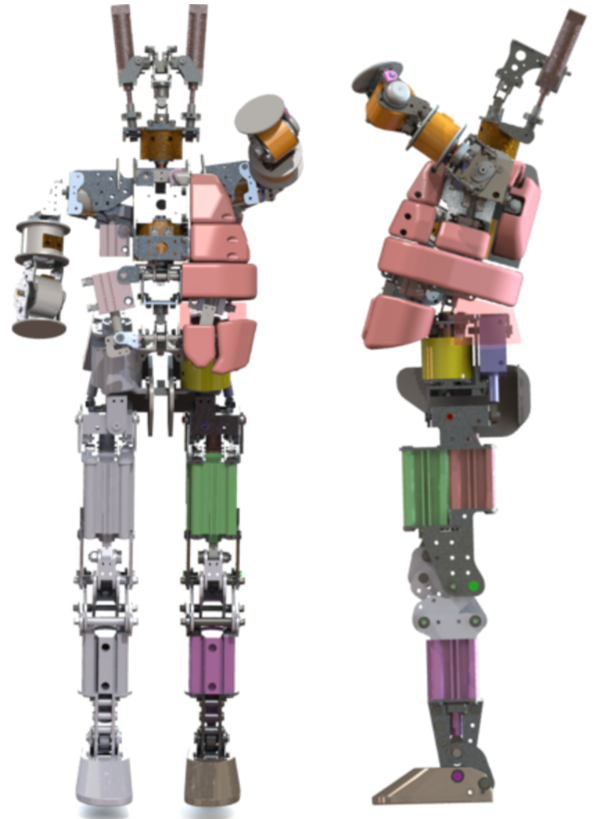
今回開発した基本骨格部分
